
Dr. Caleb Rascon
Universidad Nacional Autónoma de México
INFORMACIÓN DEL CURSO
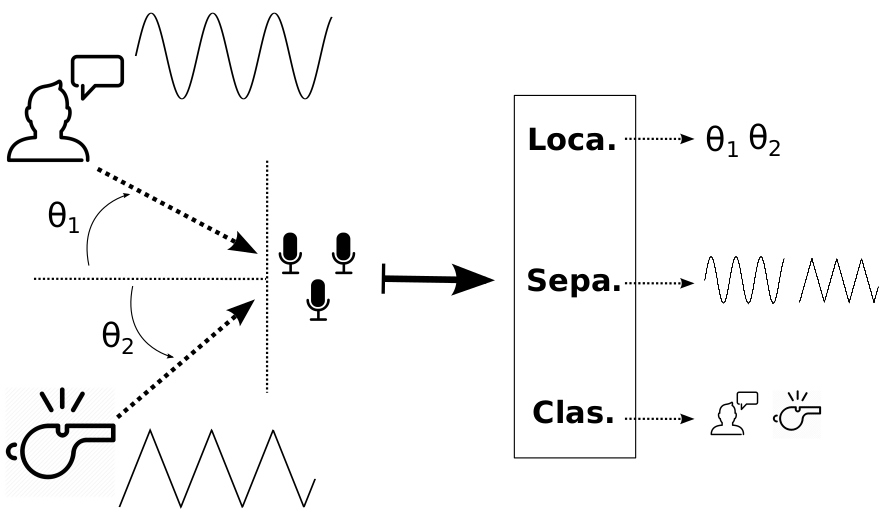
Filtrar audio se puede llevar a cabo de diversas formas. Una manera compatible con aplicaciones robóticas es la de filtrar los datos auditivos provenientes de una dirección deseada (asumiendo que en dicha dirección se encuentra la fuente de interés). Este tipo de filtrado se le conoce como “filtrado espacial”, y en este curso se demostrarán diversas formas de llevarlo a cabo. Se presentarán las herramientas de captura de audio (JACK Audio Connection Toolkit), así como recursos de evaluación (Corpus AIRA). Se presentará una implementación de dichos filtros, basado en ROS y en FFTW3, que puede ser utilizado libremente por la comunidad de robótica.

INFORMACIÓN DEL INSTRUCTOR
Caleb Antonio Rascón Estebané obtuvo su licenciatura en Ingeniería en Sistemas Electrónicos en el ITESM, Campus Querétaro. Fundó Makko IT, compañía dedicada al desarrollo de tecnología digital, en la cual es ahora socio pasivo, integrante de la mesa directiva y consejero en temas de Procesamiento de Señales e Inteligencia Artificial. Llevó a cabo su Doctorado en la Universidad de Manchester del Reino Unido, sin necesidad de hacer previamente una maestría. Llevó a cabo dos pos- doctorados y apoyó como Técnico Académico al grupo de Interacción Humano-Robot conocido como Grupo Golem de la UNAM en temas de Audición Robótica e Integración Inter-modular. Le fue otorgada la distinción de Innovador menor de 35 por parte del MIT Technology Review, Edición México 2014. Fue miembro del Consejo Ejecutivo de la Competencia Internacional RoboCup@Home. Publica constantemente en revistas científicas sobre temas de audio, y ha sido ponente magistral en conferencias académicas y de difusión científica. Actualmente es un Investigador Asociado en la UNAM donde lleva a cabo investigación en el área de Análisis de Escenas Auditivas. Es tutor del Posgrado en Ciencia e Ingeniería de la Computación y del Posgrado de Ingeniería Eléctrica dentro de la UNAM.